UKZN’s annual Mechanical Engineering Open Day, a major highlight of the Discipline’s calendar, took place on Wednesday 16 October, at the UNITE School of Engineering building, Howard College campus. Fourth-year Engineering students displayed the fruits of months of hard work on 20 ingenious design projects to evaluators, sponsors, parents and the public.
The projects form part of the degree requirements in final-year Design and Research Project modules, and are allocated to groups of three or four students at the beginning of the year. They offer the opportunity to gain experience for the world of work and put the skills learned throughout their degrees to the test.
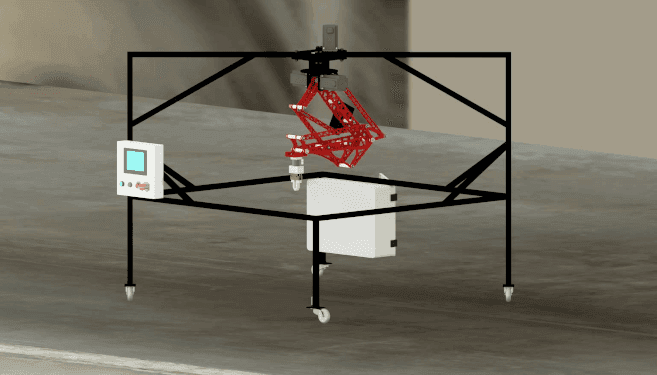
A group made up of Mr Dylan Janse Van Rensburg, Mr Sduduzo Khoza and Mr Nikyle Bisseru, designed and optimised a 3 degree of freedom (3DOF) hybrid kinematic pick and place robotic system; its degrees of freedom refer to the configuration of various independent parameters defining the system.
Given the growth of competitors in emerging markets such as Europe and Asia when it comes to manufacturing, the team set out to find a solution to the problems confronted by small to medium sized manufacturers that are struggling to remain technologically competitive amidst growing capital costs for manufacturing process equipment. The project also looked ahead to an Industry 4.0 manufacturing paradigm that will involve the use of robots to automate processes, increase production rates and improve production quality.
The team’s robot is designed to pick up, place and even sort payloads of up to 5kg, and is a cost-effective solution for the South African market. Their aim was to enhance the scope of the robotic industry in South Africa by the innovation of hybrid, kinematic robotic architectures. Their research in the build-up to the creation of their design indicated that theirs is the first hybrid architecture with an inverted design, meaning it is mounted to the roof or hanging from a structure, instead of being mounted to the floor.
‘This prototype is merely a starting point for this type of hybrid architecture as the design has many potential applications and is easily scalable for many more,’ said team leader Janse Van Rensburg.
The team is proud of their contribution to the limited range of hybrid robot designs in the world, and of what they managed to achieve through the challenging design process. They had to face the limitations of reality and work within a limited budget and within the capabilities of the workshop available to achieve their vision. Through extensive research and development, the team also managed to develop a control system that compares to the functionality of an industrial level robot control system.
Visitors to the Open Day saw the 3DOF hybrid kinematic robot in action and learnt how a hybrid robot differs from a normal serial robot and parallel kinematic manipulator robot.
Words: Christine Cuénod
Photograph: Supplied